CI & CD Infrastructure

Short status on pipelines:
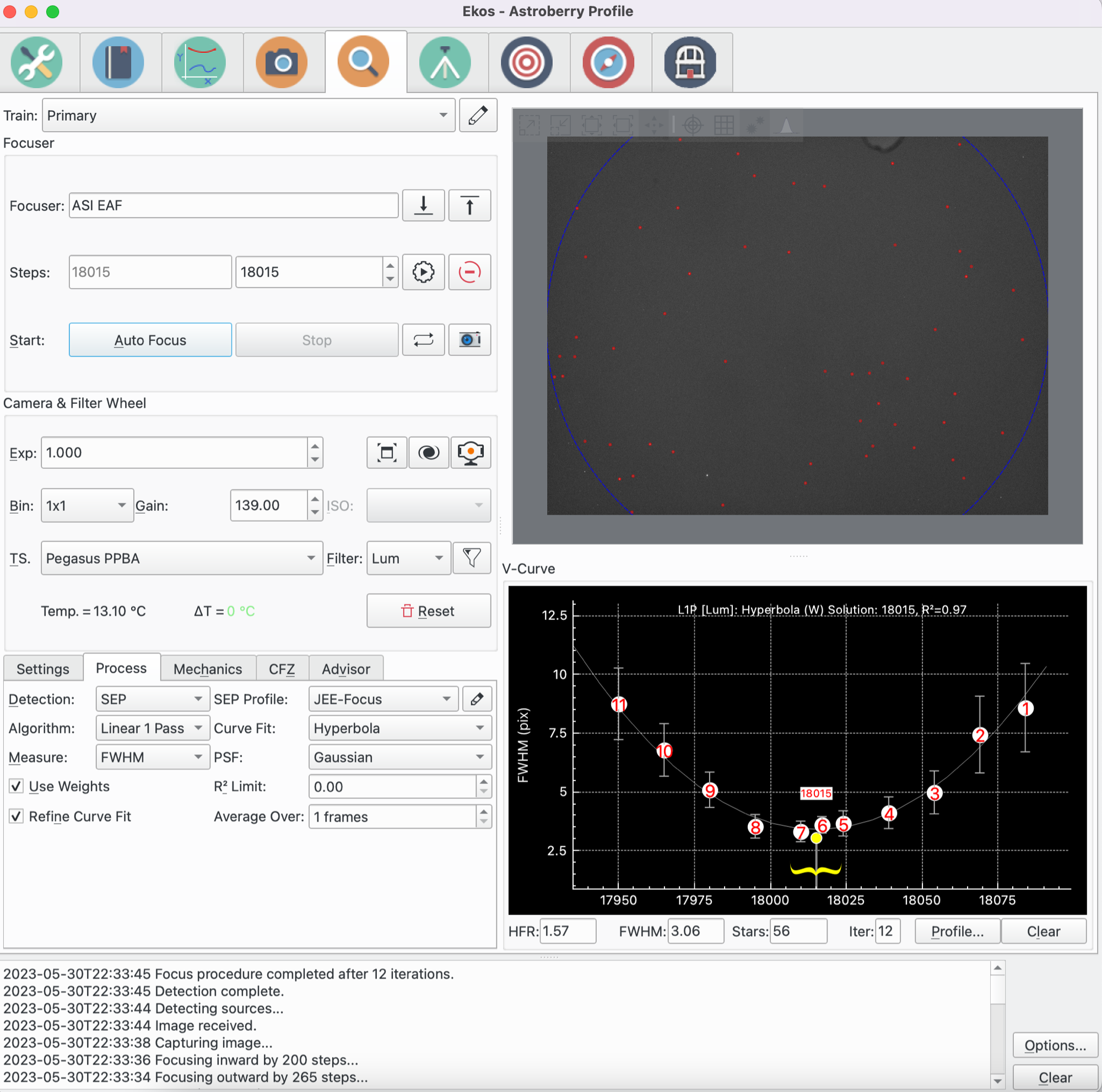
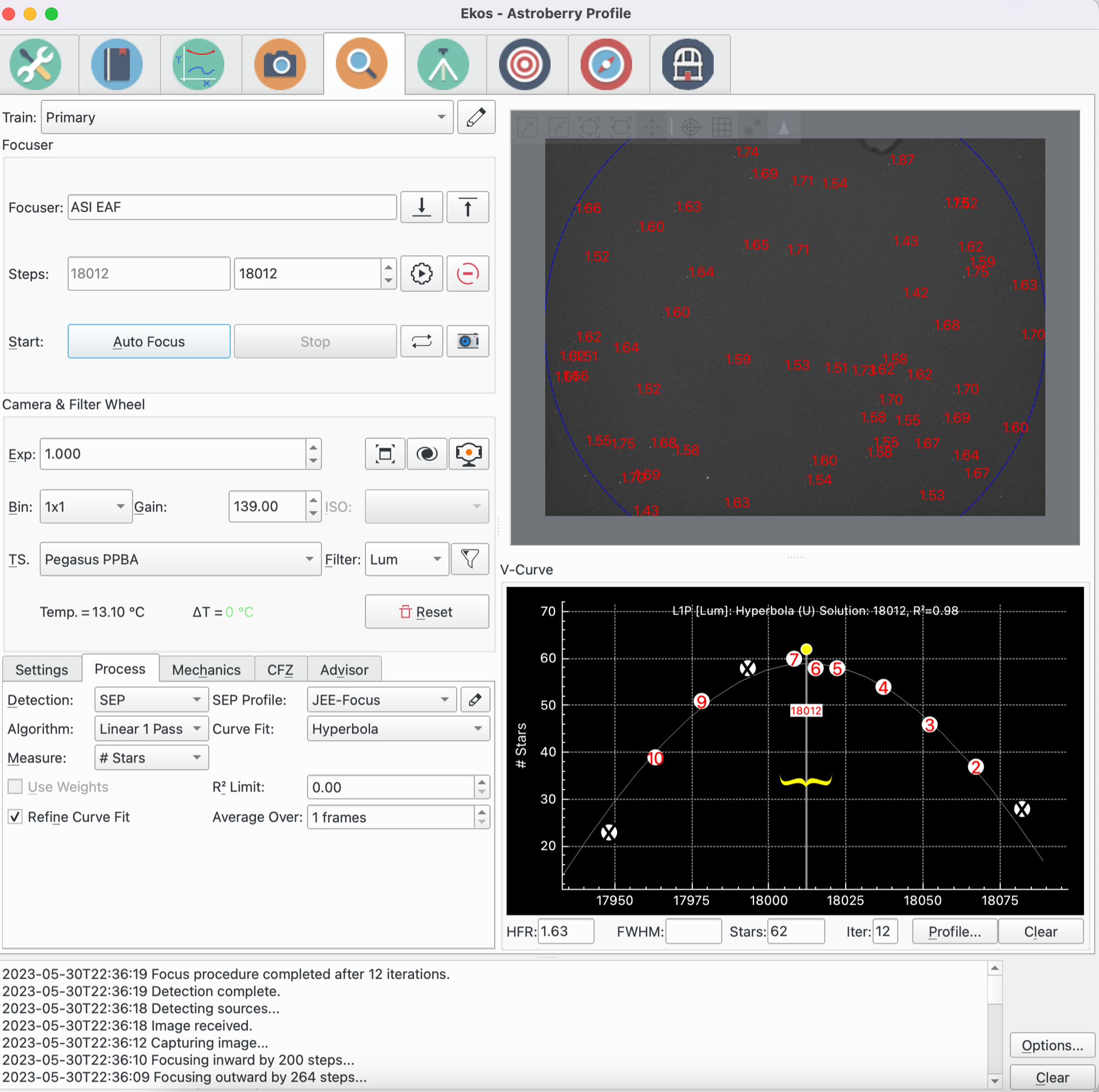
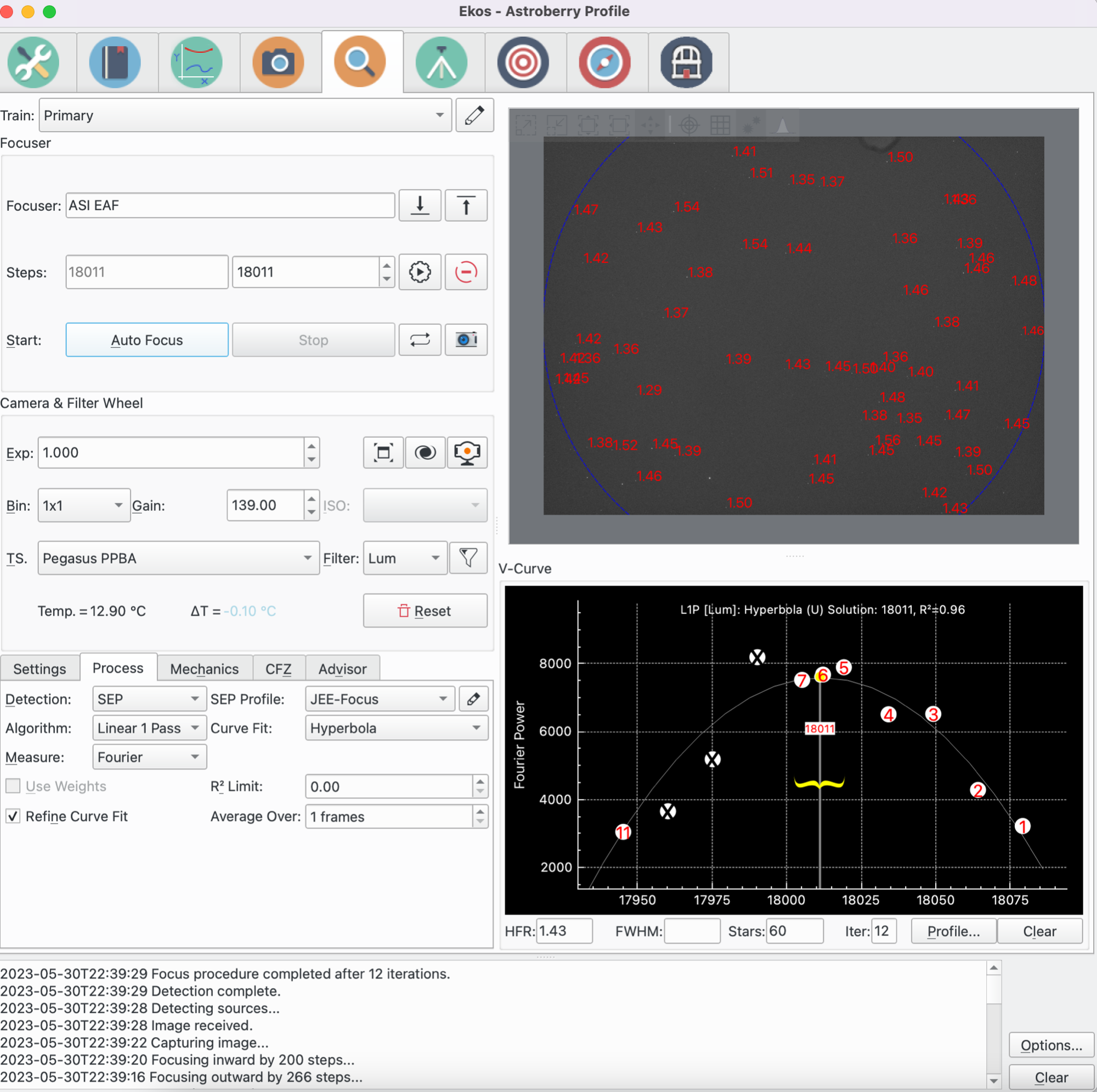
Rejoice Newtonian, SCT, and RC owners! With KStars new Donut Buster feature, your donut focusing woes might be something of the past. John Evans implemented this experimental feature to help protect against outliers that might affect your autofocus routine. In addition to that, the Focus Advisor is now automatically applied when creating new profiles. Based on the type of equipment you have in your optical train, the Focus Advisor would try to guess the optimal focus settings for your setup. Both features are experimental and would benefit from your feedback.
Akarsh Simha introduced the ability to orient the sky map to match the view through any instrument.
A view is a collection of settings: the orientation of the sky map, how the orientation changes as the sky map is panned, whether it is mirrored or not, and optionally the field-of-view to set the map to.
If no views are defined, KStars introduces a set of standard / "demo" views by default. Existing views can be edited and new views can be added using the "Edit Views..." interface. They can also be re-ordered in the interface. The ordering of the views in the "Edit Views..." dialog defines the order in which views will be cycled through using the keyboard shortcuts Shift + Page Up and Shift + Page Down. Thus, you can set up the views for easily switching between naked eye / finder scope / telescope views for easy star-hopping.
Furthermore, there is a new option in the View menu that enables mirroring the sky map so as to be able to match the view through an erecting prism used for example on a Schmidt-Cassegrain or Refracting type telescope.
The rotation feature overlay now also marks East in addition to north and zenith, so as to know easily whether the display is mirrored or not.
Hy Murveit added a very useful Blinking feature to the FITS Viewer tool. This adds several ways to blink; that is, compare multiple images.
In Analyze, one can now move from one session to the next (forward or backward).
Keyboard shortcuts are provided for that.
Another set of keyboard shortcuts both advance and show the next image in the same FITS Viewer.
Thus, for example, one can advance through all the captured images of the evening, showing all the captures on the FITS Viewer by repeating a keyboard shortcut.
A useful complement to this might be adding the ability to delete bad captures, but for now that will have to wait for a rainy day.
In the FITS Viewer, the Open File menu command (both in the main KStars top menu, and in the FITS Viewer menu) now allows multiple files to be selected. If they are then the files are opened in individual tabs.
Going along with the above, keyboard shortcuts have been added to move to the next or previous FITS Viewer tab, Also helpful to the above is a new command to zoom in/out all tabs (not just the current one).
There is a new Blink Directory menu command (in both menus, as above) which will open a single tab with a list of all the images below the directory selected (that is, both in that directory, and in directories below it). It initially displays the first image, but new commands work in that tab to switch to displaying the next (or previous) image file in the list. This could be used to blink hundreds of files.
Dušan Poizl added an option to capturing sky flats. When shooting flats at sky it often end up in never-ending loop of adjusting exposure because intensity of light change and calculation of exposure break down. Adjust the tolerance to 2000 ADU to higher for a better chance at capturing sky flats.

- Merge requests run the custom build and the CI builds
- Master runs the CI build (though there could be other things we run, such as CVE scans)
- Craft recipes are run from the last commit of the master or release branch, they require "build" and "build-and-test-stable" to be run manually beforehand.
- Publishing to Microsoft store is available after the Windows Craft is run.
This is still an ongoing process and we hope to have this process fully automated by 3.7.1 release where we will automatically publish latest releases for both stable and master branches.
Donut Buster
Custom Views
A view is a collection of settings: the orientation of the sky map, how the orientation changes as the sky map is panned, whether it is mirrored or not, and optionally the field-of-view to set the map to.
If no views are defined, KStars introduces a set of standard / "demo" views by default. Existing views can be edited and new views can be added using the "Edit Views..." interface. They can also be re-ordered in the interface. The ordering of the views in the "Edit Views..." dialog defines the order in which views will be cycled through using the keyboard shortcuts Shift + Page Up and Shift + Page Down. Thus, you can set up the views for easily switching between naked eye / finder scope / telescope views for easy star-hopping.
The rotation feature overlay now also marks East in addition to north and zenith, so as to know easily whether the display is mirrored or not.
Blinking
In Analyze, one can now move from one session to the next (forward or backward).
Keyboard shortcuts are provided for that.
Another set of keyboard shortcuts both advance and show the next image in the same FITS Viewer.
Thus, for example, one can advance through all the captured images of the evening, showing all the captures on the FITS Viewer by repeating a keyboard shortcut.
A useful complement to this might be adding the ability to delete bad captures, but for now that will have to wait for a rainy day.
Shift-selecting would select files from the first to the shift-clicked file. Clearly one wouldn't want to select 100 files resulting in 100 tabs, but this can be used to, e.g. compare 10 images.
Going along with the above, keyboard shortcuts have been added to move to the next or previous FITS Viewer tab, Also helpful to the above is a new command to zoom in/out all tabs (not just the current one).
There is a new Blink Directory menu command (in both menus, as above) which will open a single tab with a list of all the images below the directory selected (that is, both in that directory, and in directories below it). It initially displays the first image, but new commands work in that tab to switch to displaying the next (or previous) image file in the list. This could be used to blink hundreds of files.
Sky Flats
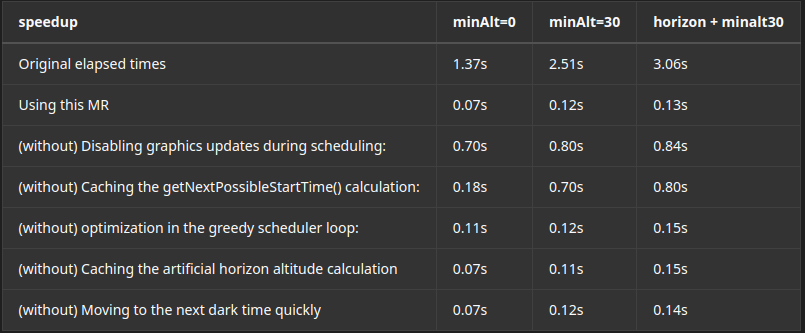
Scheduler Refactor
Wolfgang Reissenberger continues with his work on Separating Business Logic from UI in Scheduler. Over the years the Scheduler has grown to one of the most complex classes. With this release we refactored the Scheduler class and separated the UI from the underlying state model and its business logic. This opens the door for future development of new scheduling features and a much modular approach towards more flexible sequencing approaches.
Standalone Editor
To add any job to the scheduler, you need at minimum the following:
- Target
- Sequence File
The sequence file contains all your sequence settings (e.g. Capture 20x15 LRGB images). To create this file, you first need to add sequence job in the Capture module and then save the corresponding sequence. While this facilitates re-usability across different sessions, some users wanted to create sequence on-the-fly in the scheduler.

Hy Murveit developed the standalone sequence editor in the scheduler module where it relies on settings saved from your last astrophotography session. Now it's easier than ever to plan scheduler jobs without having Ekos or your equipment profile running!